دستگاههای اندازه گیری الکتریکی (Electrical Measurement Insturment)، تجهیزاتی هستند که به وسیله آن مقدار کمیت یا دامنه مورد نظر اندازه گرفته میشود. کمیت مورد اندازهگیری میتواند ولتاژ، جریان، توان و غیره باشد.
در حالت کلی، وسایل اندازهگیری به دو دسته تقسیم میشوند:

دستگاههای اندازهگیری اصلی
«دستگاه اندازهگیری اصلی» (Absolute Instrument) به وسیلهای گفته میشود که در آن اندازهگیری بر حسب یکی از پارامترهای دستگاه انجام میشود. عموما بدلیل تغییرات مقدار کمیت مورد نظر از وسایل اندازهگیری اصلی به طور مداوم استفاده میشود. با اینکه این فرآیند زمانبر است اما این مقادیر به صورت تحلیلی محاسبه میگردد.
دستگاههای اندازهگیری فرعی
در این وسایل، کمیت مورد نظر به طور مستقیم اندازهگیری میشود. این دستگاهها، نسبت به یک وسیله اندازهگیری فرعی (استاندارد) دیگر کالیبره میشوند. به عنوان مثال میتوان به ولتمتر، آمپرمتر و واتمتر اشاره کرد. از وسایل اندازهگیری فرعی به طور عملی در صنعت استفاده میشود.
شکل زیر، انواع وسایل اندازهگیری فرعی را نشان میدهد:

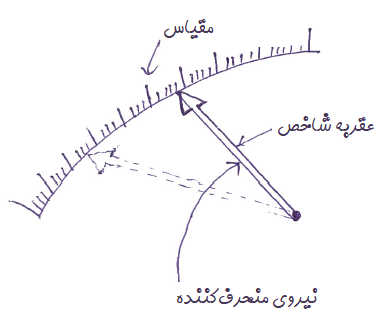
دستگاه اندازهگیری فرعی دارای شاخص (Indicating Instrument): این وسیله از یک صفحه مدرج شمارهدار و یک عقربه اشارهگر تشکیل شده است. عقربه اشارهگر، اندازه کمیت مورد نظر را نشان میدهد.
دستگاه اندازهگیری فرعی ضبطکننده (Recording Instrument): این وسیله، مقدار کمیت مورد نظر را به طور پیوسته در یک بازه زمانی مشخص اندازهگیری میکند. به این ترتیب، مشخصات کمیت در یک بازه مشخص ضبط میشود.
دستگاه اندازهگیری فرعی انتگرالگیر (Integrating Instrument): این وسیله، مقدار کلی کمیت مورد نظر در یک بازه زمانی را نشان میدهد.
دستگاه اندازهگیری فرعی دارای شاخص الکترومکانیکی (Electromechanical Indicating Instrument): برای آنکه عملکرد این وسیله صحیح باشد، سه عامل زیر باید در نظر گرفته شود:
- «نیروی منحرفکننده» (Deflecting Force)
- «نیروی کنترلکننده» (Controlling Force)
- «نیروی میراکننده» (Damping Factor)
نیروی منحرفکننده
اگر وسیله اندازهگیری، سیگنال ورودی نداشته باشد، عقربه اشارهگر یا شاخص عدد صفر را نشان خواهد داد. برای آنکه عقربه از نقطه صفر منحرف شود، یک نیرو لازم است. این نیرو، نیروی منحرف کننده نام دارد. سیستمی که نیروی منحرفکننده را تولید میکند "Deflecting System" نامیده میشود. به طور کلی، سیستم منحرفکننده سیگنال الکتریکی را به نیروی مکانیکی تبدیل میکند. شکل زیر، عقربه اشارهگر دستگاه اندازهگیری و نیروی منحرفکننده را نشان میدهد:
 شکل (۱)
شکل (۱)
اثر دامنه
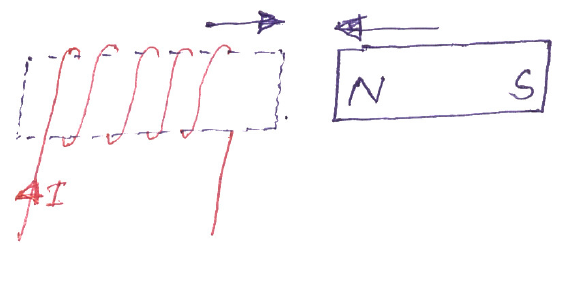
هنگامی که یک جریان از سیمپیچ عبور میکند، یک میدان مغناطیسی موهومی مانند آهنربای دائمی در آن ایجاد میشود. اگر یک قطعه آهنی نرم در نزدیکی سیمپیچ قرار بگیرد، مغناطیسی میشود. بسته به جهت جریان در سیمپیچ، بین قطعه آهنی نرم و سیمپیچ یک نیروی جاذبه به وجود میآید. در این حالت، سیمپیچ ساکن و آهنربای دائمی متحرک است.
در شکل زیر، یک سیمپیچ حامل جریان در مجاورت آهنربای دائم نشان داده شده است:
 شکل (۲)
شکل (۲)
از این قانون در «وسایل اندازهگیری جذبکننده آهن متحرک» (Moving Iron Attraction Type Instrument) استفاده میشود.
اگر دو قطعه آهنی نرم در مجاورت یک سیمپیچ حامل جریان قرار بگیرند، بین دو قطعه آهنی نیروی دافعه به وجود خواهد آمد. از این قانون در «وسایل اندازهگیری دفعکننده آهن متحرک» (Moving Iron Repulsion Type instrument) استفاده میشود.
نیروی بین آهنربای دائم و یک سیمپیچ حامل جریان
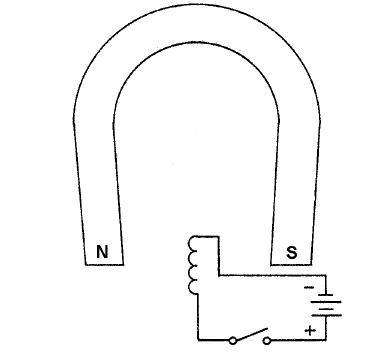
هنگامی که یک سیمپیچ حامل جریان در مجاورت میدان مغناطیسی آهنربای دائمی قرار میگیرد، یک نیرو بین آنها ایجاد میشود. از این اصل در «دستگاههای اندازهگیری سیمپیچ متحرک» (Moving Coil Type Instrument) استفاده میشود. در این حالت، آهنربای دائمی ساکن و سیمپیچ متحرک است.
شکل زیر، یک آهنربای دائم ساکن را در مجاورت سیمپیچ متحرک نشان میدهد:

شکل (۳) یک سیمپیچ متحرک را در مجاورت یک آهنربای دائمی نشان میدهد. در این حالت هیچ جریانی از سیمپیچ عبور نمیکند. در این حالت با بسته شدن کلید، یک جریان از سیمپیچ عبور میکند. به این ترتیب، یک میدان مغناطیسی به وجود میآید که به میدان مغناطیسی آهنربای دائمی واکنش نشان میدهد.
 شکل (۳)
شکل (۳)
قسمت پایینی سیمپیچ در شکل (۳)، به قطب شمال این آهنربای الکتریکی تبدیل خواهد شد. از آنجا که قطبهای ناهمنام یکدیگر را جذب میکنند، سیمپیچ حرکت خواهد کرد و به وضعیت شکل زیر میرسد:
 شکل (۴)
شکل (۴)
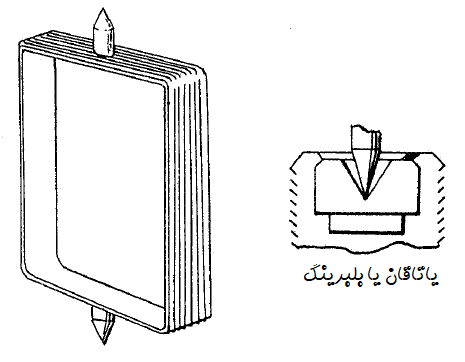
سیمپیچ روی یک قاب آلومینیومی یا بوبین سیمپیچی شده است و «یاتاقانها» (Bearings) از آن نگهداری میکنند. به همین دلیل، سیمپیچ به راحتی قابلیت حرکت دارد. این مسئله در شکل زیر نشان داده شده است:
 شکل (۵)
شکل (۵)
دو مشکل در استفاده از این دستگاه برای اندازهگیری وجود دارد. اول اینکه هنگامی که هیچ جریانی از سیمپیچ عبور نمیکند، باید راهی برای بازگرداندن سیمپیچ به حالت اولیه وجود داشته باشد. دوم اینکه باید روشی برای اندازهگیری مقدار حرکت سیمپیچ وجود داشته باشد.
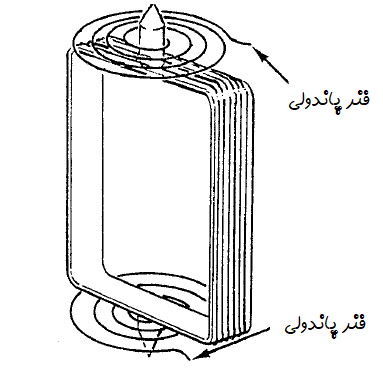
مشکل اول با اتصال «فنر پاندولی» (Hairsprings) در دو انتهای سیمپیچ قابل حل است. این مسئله در شکل زیر نشان داده شده است:
 شکل (۶)
شکل (۶)
از این فنرها میتوان برای ایجاد اتصال الکتریکی با سیمپیچ نیز استفاده کرد. هنگامی که جریان وجود ندارد، فنرهای پاندولی باعث میشوند که سیمپیچ به موقعیت اولیه خود بازگردد. همچنین هنگامی که از سیمپیچ جریان عبور میکند، این فنرها در برابر حرکت سیمپیچ مقاومت میکنند. هنگامی که جاذبه بین میدانهای مغناطیسی آهنربای دائمی و سیمپیچ با نیروی وارد بر فنرهای پاندولی برابر میشود، سیمپیچ از حرکت در جهت آهنربای دائمی باز میایستد.
با افزایش جریان سیمپیچ، میدان مغناطیسی ایجاد شده در اطراف آن بزرگ میشود. هرچه میدان مغناطیسی اطراف سیمپیچ بیشتر باشد، سیمپیچ بیشتر حرکت میکند. از این خاصیت، در اندازهگیری الکتریکی استفاده میشود.
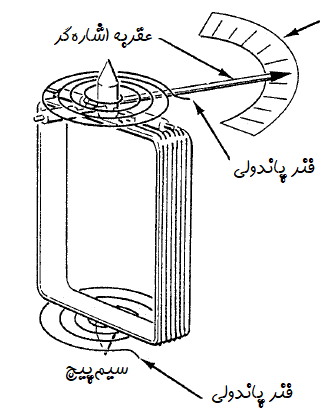
برای اندازهگیری مقدار حرکت سیمپیچ، یک عقربه اشارهگر به سیمپیچ و سپس به صفحه مدرج وصل میشود. با حرکت سیمپیچ، اشارهگر تغییر موقعیت میدهد. با استفاده از اشارهگر، میتوان مقدار جریان گذرنده از سیمپیچ را اندازهگیری کرد. این مسئله در شکل زیر نشان داده شده است:
 شکل (۷)
شکل (۷)
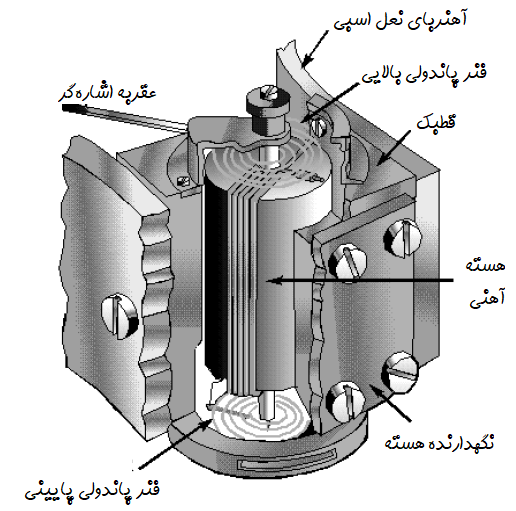
برای افزایش دقت و راندمان در این دستگاه اندازهگیری دو راه وجود دارد. یکی استفاده از هسته آهنی نرم داخل سیمپیچ است تا میدانهای مغناطیسی در داخل سیمپیچ متمرکز شوند. دوم، استفاده از «قطبک انحنا دار» (Curved Pole Pieces) است. این قطبکها به آهنربا متصل هستند و تضمین میکنند که با افزایش جریان در سیمپیچ، نیروی وارد بر آن نیز زیاد میشود.
شکل زیر، یک دستگاه اندازهگیری به روش سیمپیچ متحرک – آهنربا ساکن (Permanent Magnet Moving Coil) را با جزییات کامل نشان میدهد:
 شکل (۸)
شکل (۸)
بیشتر دستگاههای اندازهگیری بر اساس سنجه یک آهنربای ساکن و یک سیمپیچ متحرک طراحی میشوند. این دستگاه به افتخار دانشمند فرانسوی، «آرسنوال» (d’Arsonval)، بیشتر به نام «سنجه آرسنوال» (Arsonval Meter Movement) شناخته میشود. شکل زیر، سنجه آرسنوال را نشان میدهد:
 شکل (۹)
شکل (۹)
نیروی بین دو سیمپیچ حامل جریان
هنگامی که دو سیمپیچ حامل جریان در مجاورت یکدیگر قرار گیرند، یک نیروی دافعه بین آنها ایجاد میشود. اگر یک سیمپیچ، متحرک و دیگری ثابت باشد، سیمپیچ متحرک از سیمپیچ ثابت دور خواهد شد. از این اصل، در «دستگاههای الکترودینامومتر» (Electrodynamometer Type Instrument) استفاده میشود. شکل زیر دو سیمپیچ حامل جریان را نشان میدهد:
 شکل (۱۰)
شکل (۱۰)
نیروی کنترلکننده
برای آنکه عقربه اشارهگر یا شاخص، روی مقدار اندازهگیری شده ثابت بماند، لازم است یک نیرو در خلاف جهت نیروی منحرفکننده به آن اعمال شود. این نیرو را به نام نیروی کنترلکننده میشناسند و سیستم آن را سیستم کنترلکننده مینامند. فرض کنید سیگنال خارجی که قصد اندازهگیری آن را داریم، از بین برود. در این حالت، عقربه شاخص باید مجددا به عدد صفر بازگردد. بازگشت عقربه به عدد صفر، به دلیل وجود نیروی کنترلکننده است. هنگامی که گشتاور منحرفکننده با گشتاور کنترلکننده برابر شود، عقربه شاخص ثابت باقی میماند. در این حالت: Td = Tc که در آن، Td «گشتاور منحرفکننده» (Deflecting Torque) و Tc «گشتاور کنترلکننده» (Controlling Torque) است.
کنترل فنر
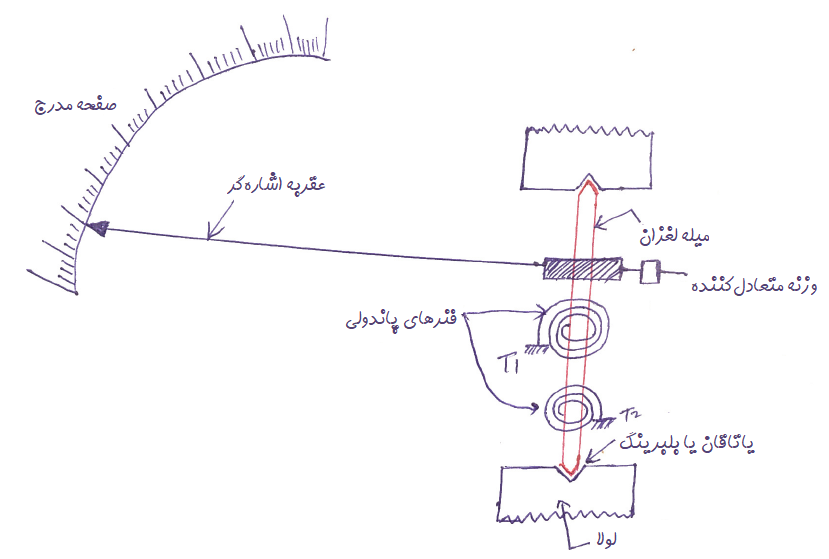
یک میله لغزان با دو فنر متصل به آن را در نظر بگیرید. شکل زیر این ساختار را نشان میدهد:
 شکل (۱۱)
شکل (۱۱)
میله لغزان روی یاتاقان یا بلبرینگ قرار گرفته است. به این ترتیب «نیروی اصطکاکی» (Frictional Force) بین «لولا» (Pivot) و میله لغزان، مینیمم است. دو فنر در جهات مخالف هم قرار میگیرند تا خطای دمایی به حداقل مقدار ممکن خود برسد. فنرها از جنس برنز هستند.
با اعمال جریان، عقربه اشارهگر به دلیل چرخش فنر، منحرف میشود. با چرخش میله لغزان، فنر متصل به میله لغزان، با حرکت عقربه مخالفت میکند. گشتاور تولید شده توسط فنر، به طور مستقیم با انحراف عقربه (θ) متناسب است. یعنی داریم: Tc∝θ
گشتاور منحرف کننده تولید شده (Td) با I متناسب است. هنگامی که Td=Tc ،عقربه اشاره گر به حالت ثابت خود میرسد. بنابراین میتوان گفت: θ∝I
صفحه مدرج این دستگاه اندازه گیری، با θ و I به صورت مستقیم متناسب است.
نیروی میراکننده
گشتاور منحرفکننده و گشتاور کنترلکننده که به وسیله سیستمهای مرتبط با آنها تولید شدهاند، الکترومکانیکی هستند. به دلیل نیروی اینرسی تولید شده توسط این سیستمها، عقربه اشارهگر هنگام رسیدن به محل نهایی خود نوسان خواهد کرد. به این ترتیب، زمان لازم برای اندازهگیری افزایش خواهد یافت. برای اینکه نوسانات میرا شوند، استفاده از یک نیروی میراکننده لازم خواهد بود. این نیرو به وسیله سیستمهای مختلفی تولید میشود:
- «میرایی به وسیله اصطکاک هوایی» (Air Friction Damping)
- «میرایی به وسیله اصطکاک با استفاده از سیال» (Fluid Friction Damping)
- «میرایی به وسیله جریان گردابی» (Eddy Current Damping)
میرایی به وسیله اصطکاک در هوا
شکل زیر را در نظر بگیرید:
 شکل (۱۲)
شکل (۱۲)
مطابق شکل، اشارهگر و پیستون به صورت مکانیکی به میله لغزان متصل شدهاند. هنگامی که اشارهگر در جهت عقربههای ساعت نوسان میکند، پیستون به سمت داخل حرکت میکند و هوای داخل سیلندر فشرده میشود.
اگر اشارهگر در جهت خلاف عقربههای ساعت نوسان کند، پیستون به سمت بیرون حرکت میکند و فشار هوای داخل سیلندر کاهش پیدا میکند. به این ترتیب، فشار هوای بیرون بیشتر از فشار داخل سیلندر خواهد شد. به همین دلیل، پیستون به سمت پایین حرکت خواهد کرد. در این حالت، اشارهگر تمایل دارد که در جهت خلاف عقربههای ساعت حرکت کند.
میرایی جریان گردابی
یک دیسک آلومینیومی دوار را مانند شکل زیر در نظر بگیرید:
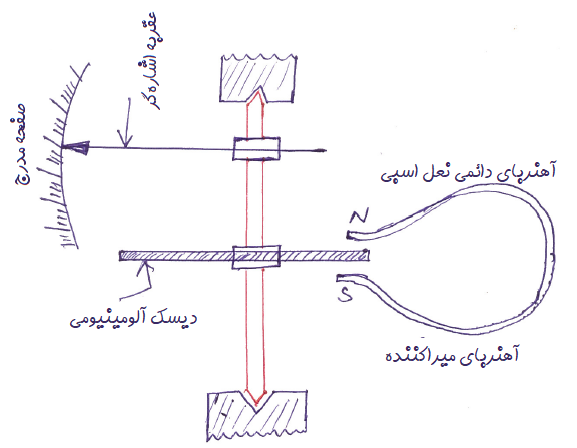 شکل (۱۳)
شکل (۱۳)
این دیسک به میله لغزان متصل شده است و به دلیل میدان مغناطیسی تولید شده توسط آهنربای دائم در مجاورت آن حرکت خواهد کرد.
دیسک در هنگام نوسان، خطوط شار مغناطیسی تولید شده توسط آهنربای میراکننده را قطع میکند. طبق قانون فارادی، یک نیروی محرکه الکتریکی (EMF) داخل دیسک دوار القا خواهد شد. از آنجایی که دیسک مسیرهای بسته دارد، در داخل آن جریانهای گردابی به وجود میآید. طبق قانون لنز، جریان داخل دیسک نیرویی را به وجود میآورد که با نیروی نوسان دیسک مخالفت میکند. نیروی میراکننده را میتوان با تغییر مکان آهنربا نسبت به دیسک دوار تغییر داد.
مقدمهای بر اندازهگیری مداری
از «اندازهگیری مداری» (Circuit Measurement) برای کنترل عملکرد مدارها و دستگاههای الکترونیکی و همچنین برای عیبیابی آنها استفاده میشود. از آنجا که جریان الکتریکی قابل مشاهده نیست، باید از دستگاهی استفاده کرد که بتواند بر رفتارهای داخل مدار الکتریکی نظارت کند. از «تجهیزات آزمایش» (Test Equipment)، برای اندازهگیری کمیتهای الکتریکی استفاده میشود. مشهورترین انواع تجهیزات آزمایش از «وسایل سنجش» (Metering Device) استفاده میکنند.
سنجش در داخل مدار
برخی دستگاههای الکتریکی و الکترونیکی در داخل خود، وسیله سنجش دارند. به این نوع، «سنجش در داخل مدار» (In-Circuit Meter) گفته میشود. از سنجش در داخل مدار، برای کنترل عملکرد دستگاهی که این وسیله اندازهگیری در آن نصب شده است، استفاده میشود. برای مثال، میتوان به ژنراتور یا آلترناتورمتر در برخی خودروها اشاره کرد. همچنین نیروگاههای تولید برق در پنل کنترل خود، دستگاههایی برای سنجش ولتاژ، جریان و فرکانس دارند. کنتورهای داخل ساختمان نیز از این سیستم برای سنجش توان استفاده میکنند.
در عمل، نمیتوان از این نوع سنجش در همه مدارهای الکتریکی بهره برد. معمولا با نگاه به این وسیله سنجش در برد کنترل، میتوان به صحیح بودن تجهیزات پی برد.
اگر این وسیله سنجش نشان دهد که یک دستگاه الکتریکی به درستی کار نمیکند، با استفاده از عیبیابی میتوان به دلیل خرابی رسید. عیبیابی فرآیندی است که طی آن محل دقیق خرابی در تجهیز شناسایی میشود. پس از شناسایی نوبت به تعمیر تجهیز میرسد.
سنجش خارج از مدار
در فرآیند عیبیابی معمولا لازم است از یک دستگاه اندازهگیری استفاده شود که قابلیت اتصال به تجهیزات الکتریکی و الکترونیکی را در نقاط مختلف دارد. عیبیابی معمولا به صورت نقطه به نقطه داخل تجهیز انجام میشود. این دستگاهها معمولا قابل حمل و بینیاز از محیط بیرون خود هستند و سنجش را در خارج از مدار انجام میدهند.
دستگاههای اندازهگیری خارج از مدار نسبت به دستگاههای اندازهگیری داخل مدار از انواع بیشتری برخوردارند. زیرا میتوان در هر زمان از این دستگاهها استفاده کرد. بنابراین، از این نوع سنجش بیشتر برای محلیابی خطا در یک دستگاه الکتریکی استفاده میشود.
انواع حرکت سنجه
حرکت سنجه همانطور که از نام آن مشخص است، قسمتی از سنجه است که میتواند حرکت کند. با حرکت سنجه، انرژی الکتریکی به انرژی مکانیکی تبدیل میشود. انواع مختلفی از حرکت سنجه وجود دارد. یکی از اساسیترین این حرکات، به وسیله میدان مغناطیسی به وجود میآید.
قطبنما و سیم رسانا
با عبور جریان از یک هادی رسانا، میدان مغناطیسی در اطراف هادی به وجود میآید. اگر یک قطبنما در مجاورت هادی قرار گیرد، به میدان مغناطیسی واکنش نشان خواهد داد.
شکل زیر را در نظر بگیرید:
 شکل (۱۴)
شکل (۱۴)
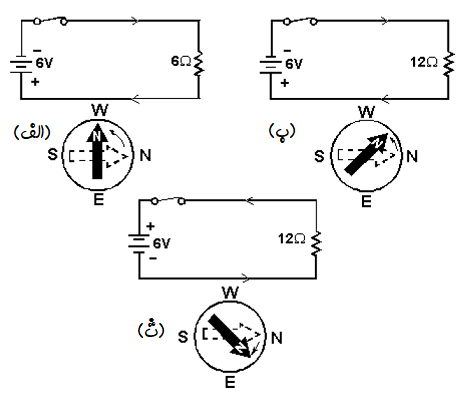
اگر باتری قطع باشد، قطب شمال قطبنما به میدان مغناطیسی شمال زمین اشاره میکند. این مسئله در شکل ۱۴-الف نشان داده شده است. هنگامی که باتری متصل است، یک جریان از مدار عبور میکند. .با عبور جریان، عقربه قطبنما با میدان مغناطیسی هادی همجهت خواهد شد. شدت میدان مغناطیسی ایجاد شده در اطراف هادی با مقدار جریان متناسب است.
در شکل ۱۴-الف، مقاومت مدار ۶ اهم است. بنابراین جریان در این مدار برابر یک آمپر است. در شکل ۱۴-ب مقاومت مدار ۱۲ اهم شده است. به این ترتیب جریان در این مدار، نیم آمپر خواهد شد. میدان مغناطیسی در اطراف هادی در شکل ۱۴-ب، نسبت به شکل ۱۴-الف ضعیفتر است.
اگر جهت جریان عوض شود، عقربه قطبنما در جهت معکوس حرکت خواهد کرد زیرا قطبیت میدان مغناطیسی معکوس شده است. در شکل جهت اتصال باتری عوض شده است. در نتیجه، عقربه قطبنما در جهت معکوس حرکت خواهد کرد.
با استفاده از مقاومتهای با مقدارهای مشخص و علامتزدن صفحه مدرج، دستگاهی به وجود میآید که میتواند جریان را اندازهگیری کند. در شکل زیر، یک سنجه ساده جریان نشان داده شده است:
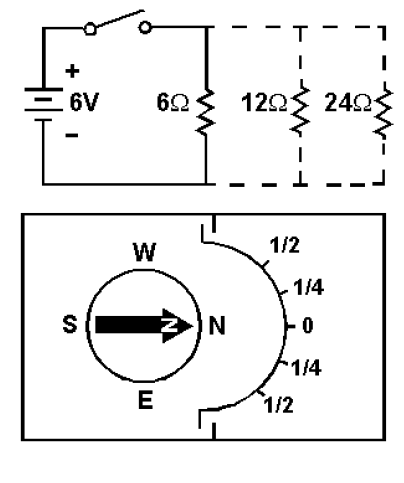 شکل (۱۵)
شکل (۱۵)
اولین «گالوانومترها» (Galvanometers) توسط این روش توسعه داده شدهاند. گالوانومتر، وسیلهای است که مقادیر کوچک جریان را اندازهگیری میکند و طبق اصول الکترومغناطیس و الکترودینامیک کار میکند. وسیله اندازهگیری نشان داده شده در شکل برای کاربردهای عملیاتی در اندازهگیری الکترونیکی چندان مناسب نیست. مقدار انحراف عقربه به میزان مجاورت عقربه و هادی حامل جریان وابسته است. به علاوه، مقادیر بسیار کوچک جریان نمیتوانند بر میدان مغناطیسی زمین غلبه کنند و عقربه حرکت نخواهد کرد.
دیدگاه خود را بنویسید